See the Google Scholar for the full list of my publications.
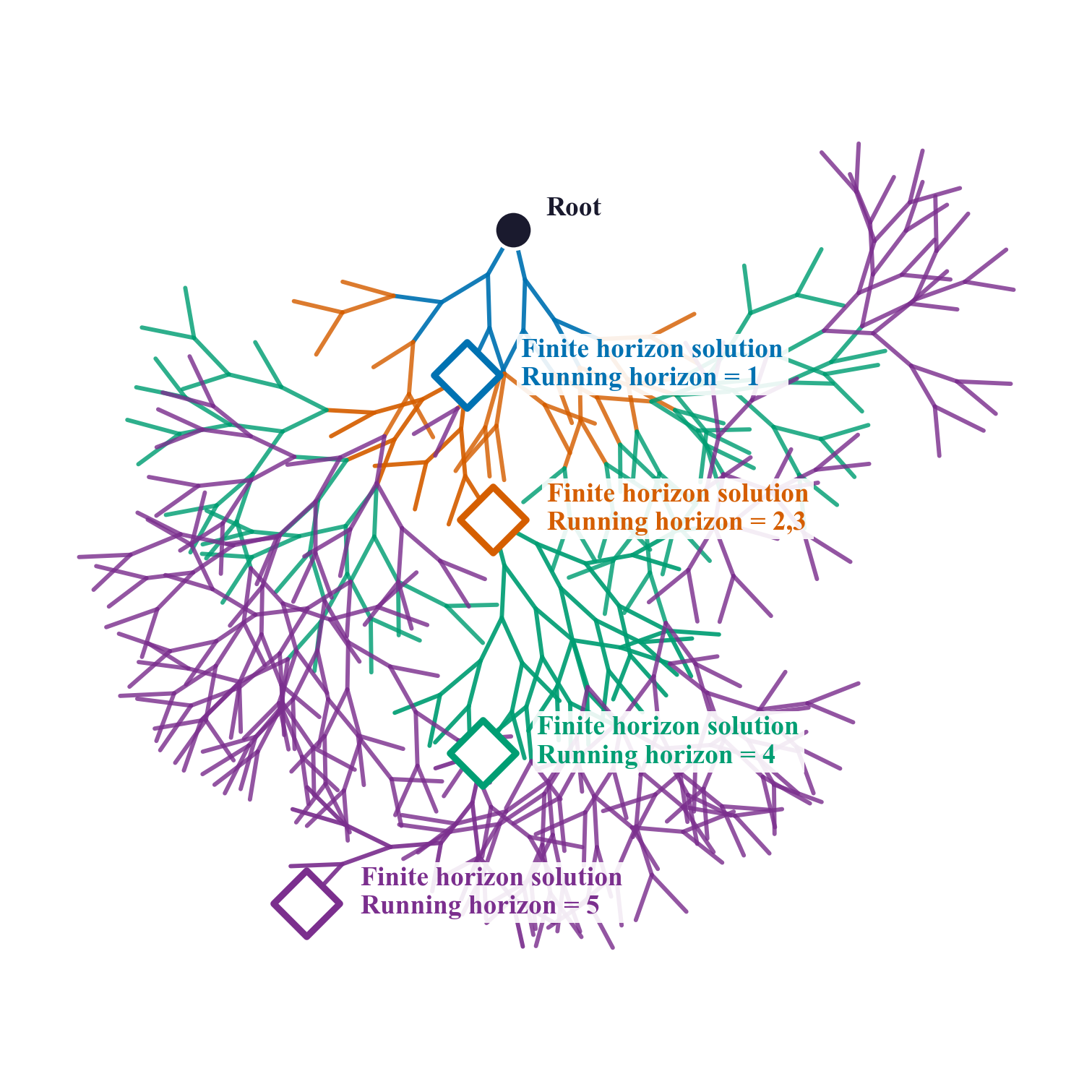
2026 Preprint Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path Finding
Jiarui Li , Federico Pecora, Runyu Zhang, and Gioele Zardini
arXiv preprint arXiv:2602.12024 , 2026
2025 Preprint FICO: Finite-Horizon Closed-Loop Factorization for Unified Multi-Agent Path Finding
Jiarui Li , Alessandro Zanardi, Federico Pecora, Runyu Zhang, and Gioele Zardini
arXiv preprint arXiv:2511.13961 , 2025
Multi-Agent Path Finding via Finite-Horizon Hierarchical Factorization
Jiarui Li , Alessandro Zanardi, and Gioele Zardini
In RSS 2025 Workshop on Fast motion planning and control in the era of parallelism and Workshop on Scalable and Resilient Multi-Robot Systems: Decision-Making, Coordination, and Learning , 2025
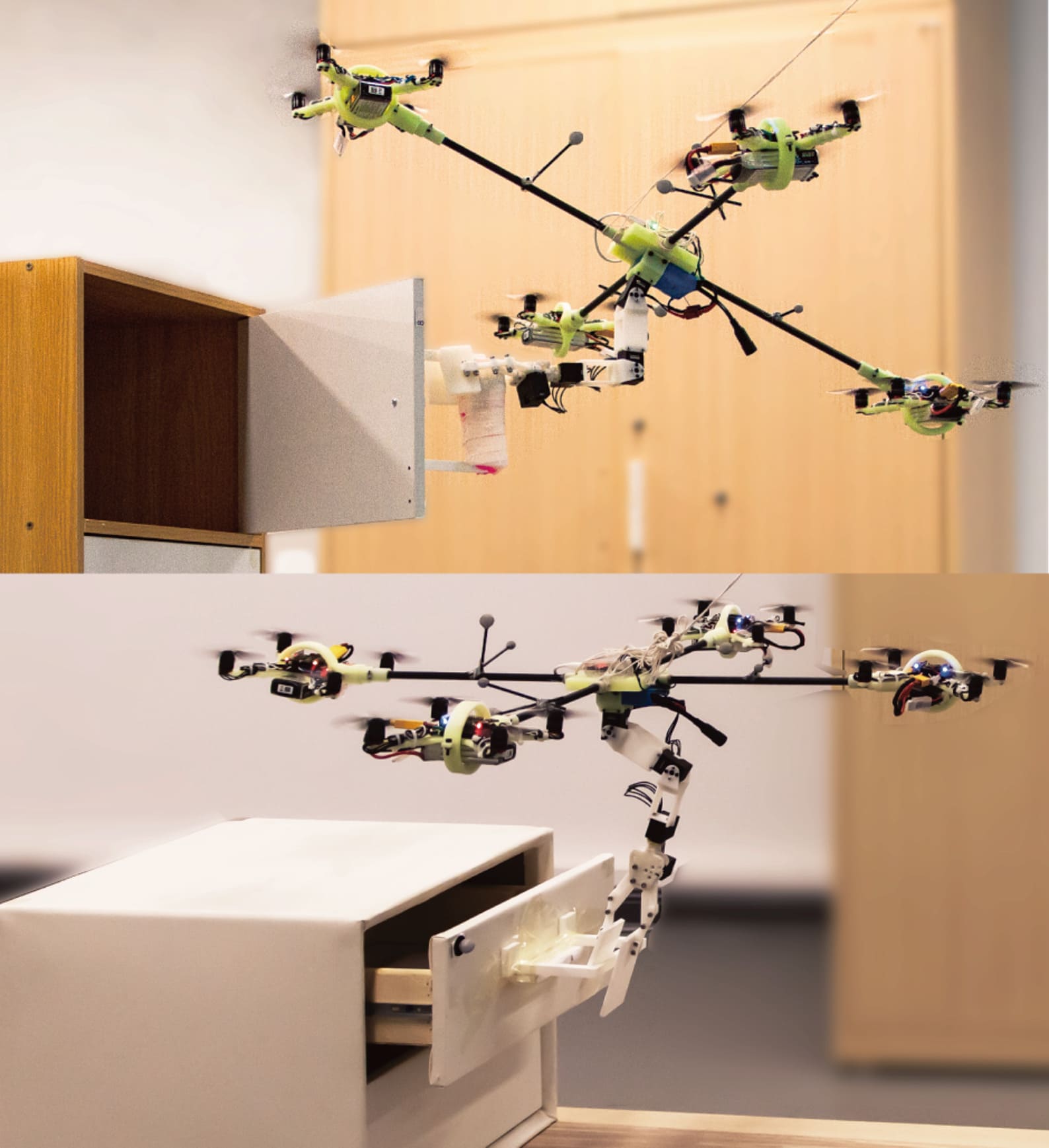
2023 IROS Sequential manipulation planning for over-actuated unmanned aerial manipulators
Yao Su* , Jiarui Li* , Ziyuan Jiao* , Meng Wang, Chi Chu, Hang Li, Yixin Zhu, and Hangxin Liu
In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS) , 2023
Best Paper Finalist on Mobile Manipulation
IROS Aggregating Single-wheeled Mobile Robots for Omnidirectional Movements
Meng Wang* , Yao Su* , Hang Li, Jiarui Li , Jixiang Liang, and Hangxin Liu
In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS) , 2023
RA-L L^3 F-TOUCH: A Wireless GelSight with Decoupled Tactile and Three-axis Force Sensing
Wanlin Li* , Meng Wang* , Jiarui Li , Yao Su, Devesh K Jha, Xinyuan Qian, Kaspar Althoefer, and Hangxin Liu
IEEE Robotics and Automation Letters , 2023
2022 IROS Downwash-aware control allocation for over-actuated uav platforms
Yao Su* , Chi Chu* , Meng Wang, Jiarui Li , Liu Yang, Yixin Zhu, and Hangxin Liu
In IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS) , 2022
 Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path FindingarXiv preprint arXiv:2602.12024, 2026
Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path FindingarXiv preprint arXiv:2602.12024, 2026
 FICO: Finite-Horizon Closed-Loop Factorization for Unified Multi-Agent Path FindingarXiv preprint arXiv:2511.13961, 2025
FICO: Finite-Horizon Closed-Loop Factorization for Unified Multi-Agent Path FindingarXiv preprint arXiv:2511.13961, 2025
 Sequential manipulation planning for over-actuated unmanned aerial manipulatorsIn IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2023
Sequential manipulation planning for over-actuated unmanned aerial manipulatorsIn IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2023


